 MENU
MENU ECE welcomes new engineering robotics center
The center, to be built on North Campus, will offer state-of-the-art facilities in a 3-story, 100,000 square foot building.
 Enlarge
EnlargeNew Robotics Facility Means More Space Than Ever for Creative Research
A newly-approved $54M robotics center promises to consolidate and expand existing robotics research at the University of Michigan. The center, to be built on North Campus, will offer state-of-the-art facilities in a 3-story, 100,000 square foot building. ECE faculty are excited at the promise the new space offers for increased collaboration and synergy of effort.
“Our students will be all in one place,” says Prof. Jessy Grizzle. “They are now scattered across so many buildings that it is hard for them to know one another, much less share knowledge. The collaboration among students of the various departments will increase tremendously, generating new ideas, new projects, and new capabilities.”
The facility will be constructed in an open plan to maximize flexibility and a free flow of ideas. In addition to lab space, the building will house offices, classrooms, space for small conferences, and a robotics museum to showcase the university’s past work. One Michigan robot, MABEL, is currently on loan to the Chicago Field Museum.
ECE’s robotics researchers are confident the new facility will aid in their research, and say they will make full use of it when the time comes.
“This building will put Michigan on the robotics map,” says Prof. Grizzle. “We already have the in-house talent to compete with the top programs in the world, but it is so spread out that many people do not see it. The new building and the work taking place in it will establish Michigan as a leading presence in the field of robotics.”
ECE has a rich history of contributions to robotics. With several different faculty contributing to different aspects of robotic design and control, the department is able to offer a number of fresh perspectives that aim to tackle different problems. Current department research spans issues of robotic movement, design, computer vision, and control of vast “robotic” systems.
Giving Robots Their Legs
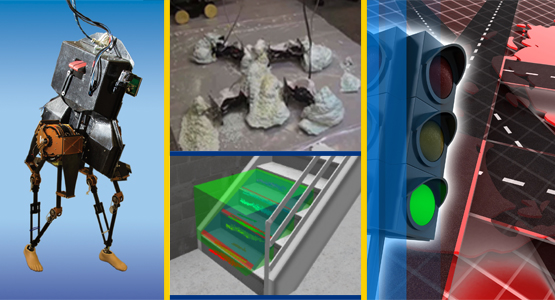
Jessy Grizzle, Elmer G. Gilbert Distinguished University Professor Jerry W. and Carol L. Levin Professor of Engineering, has earned international renown for his work with bipedal robots. His primary goal has always been to make robots move more like real people, and he’s had significant success.
He and his team devised a nonlinear control theory of two-legged locomotion that enables their machines to do this better than other similar machines.
The resulting motion is not only effective in getting the robots walking and running, but also moving in a way that is uncannily human.
Why make robots bipedal and human-like? It is estimated that 70% of the earth’s landmass is inaccessible to wheeled or tracked vehicles.
“This has stimulated interest in the design of robots that use legs as a means of locomotion,” Prof. Grizzle explains. “With legs, robots can step over obstacles or use sparse footholds.”
Prof. Grizzle’s robot MABEL became the fastest bipedal robot with knees in the world, with a gait of about 9 miles per hour. She was also the world’s first robot with a trip reflex. MABEL’s successor, MARLO, has already taken her first solo steps outside, and continues to advance the field of robotic design for dynamic walking.
Bio-Inspired Machines Offer Bold New Perspective
Entering Prof. Shai Revzen’s BIRDS (Biologically Inspired Robotics and Dynamical Systems) lab takes you from the uncannily human to the eerily insectoid. Rather than take cues from bipedal organisms, Prof. Revzen seeks his inspiration in nature.
His research focuses on the role of mechanical dynamics in the control of animal and robot motion. He hopes to identify, model and reproduce the strategies animals use when interacting with physical objects, and mimicking those strategies in his design of robots.
His creations have resembled anything from a cockroach to a snake, and their movement is (startlingly) similar.
A different approach to robotic design taken by Prof. Revzen is to design robots than can adapt to unforeseen situations. He is building robots that can build other robots of varying shapes and functions with foam.
“In this way,” says Prof. Revzen, “we solve the problems that we find, but only after we know what they are.”
Robot Exploration and Mapping – A Computer Vision Perspective
Prof. Jason Corso, a specialist in computer vision, came to the University of Michigan in large part because of its reputation in robotics.
“The presence of an active critical mass for robotics research coupled with the support from the College is rare and exciting,” said Jason. “The centralized activity will expose me to many interesting research problems that will stimulate my work in improving the perception capabilities of robots and autonomous agents.”
Prof. Corso came to Michigan from SUNY Buffalo, where one of his research projects focused on the challenge that stairs present to autonomous ground robots. Using computer vision techniques, he devised a system to detect whether or not a given robot would be capable of traversing stairs.
“The iRobot PackBot, which is a ground-based robot used by the U.S. Army and Army Research Labs, is able to climb stairways,” said Prof. Corso, “but it cannot automatically detect and recognize whether or not their incline is traversable. We added that functionality in conjunction with our collaborators at ARL.
Swarms of Robots and Cyber-Physical Systems
Several ECE faculty work in the area of cyber-physical systems (CPS), yet another area of ECE research that impacts the robotics revolution. CPS will facilitate a future of networked robots, with applications ranging from environmental monitoring, to healthcare, agriculture, factory automation, and transportation.
“Robots are canonical examples of cyber-physical systems,” says Prof. Necmiye Ozay, who specializes in CPS. “The goal in robotics is to move a physical system to achieve certain tasks while interacting with the physical environment by using lots of computational (cyber) elements, for instance, control, perception and decision making algorithms.”
Self-driving cars might be seen as just really large robots, and are the subject of intense CPS research. Prof. Grizzle is engineering the next generation of advanced automotive safety and convenience features such as advanced cruise control and lane keeping. It takes highly complex interactions between software, sensors and control algorithms for an automobile to navigate traffic and road conditions safely.
Outside the car, Professor Stéphane Lafortune is conceptualizing Intelligent Transportation Systems (ITS) for smart intersections. In addition, Prof. Lafortune has begun a new project in cyber-security issues in CPS.
Professor Demosthenis Teneketzis has been investigating several topics related to cyber-physical systems, including cyber-security, energy markets, and the design of resilient systems by combining ideas from stochastic control, game theory, and the theory of incentives (mechanism design).
CPS tackles the reality – now or in the future – of large networks of interconnected autonomous systems (eg, robots), and safety is a key concern. “It is important to have a good idea on the safety limits of any autonomous system before we let them in our every day lives,” says Prof. Ozay.
“I am very excited about the new robotics center,” said Prof. Ozay. “We have quite a bit of critical mass working in areas related to robotics scattered all around the campus. This new facility will bring this critical mass together and definitely facilitate collaboration between faculty and between our students. I am looking forward to it.”
More Info
Jessy Grizzle Named Director of Michigan Robotics
Robotics Building Design Approved
High-tech robotics center coming to U-M
Selected Videos
MARLO Walks Outside – Jessy Grizzle’s current project, MARLO, can walk in 3 dimensions, without a bar to steer him, and outdoors!
MABEL Runs – Fast! – Jessy Grizzle’s previous creation, MABEL, breaks the world record for running robots.
From Running Roaches to Robots – Shai Revzen discusses his bio-inspired robotic creatures.
Facing the Unknown, With Robots – Shai delivered a TEDxUofM talk about bio-inspired robots and their potential to enhance human exploration.